簡(jiǎn)介:ABB機(jī)器人伺服驅(qū)動(dòng)系統(tǒng)案例 1、安全 自動(dòng)模式中,任何人不得進(jìn)入機(jī)器人工作區(qū)域 長(zhǎng)時(shí)間待機(jī)時(shí)���,夾具上不宜放置任何工件。 機(jī)器人動(dòng)作中發(fā)生緊急情況或工作不正常時(shí)�,均可使用E-stop鍵,停止運(yùn)行(但這將直接使程序終止不可繼續(xù)) 進(jìn)行編程���、測(cè)試及維修等工作……
1��、安全
自動(dòng)模式中�,任何人不得進(jìn)入機(jī)器人工作區(qū)域
長(zhǎng)時(shí)間待機(jī)時(shí),夾具上不宜放置任何工件�����。
機(jī)器人動(dòng)作中發(fā)生緊急情況或工作不正常時(shí)��,均可使用E-stop鍵���,停止運(yùn)行(但這將直接使程序終止不可繼續(xù))
進(jìn)行編程���、測(cè)試及維修等工作時(shí),必須將機(jī)器人置于手動(dòng)模式�����。
調(diào)試機(jī)器人過(guò)程中���,不需要移動(dòng)機(jī)器人時(shí)����,必須釋放使能器��。
調(diào)試人員進(jìn)入工作區(qū)域時(shí),必須隨攜帶使能器�,以防他人操作。
突然停電時(shí)���,必須立即關(guān)閉機(jī)器人主電源開(kāi)頭�,并取下夾具上的工件�。
嚴(yán)禁非授權(quán)人員操作機(jī)器人。
2�����、簡(jiǎn)介
1974 ABB第一臺(tái)機(jī)器人誕生��,IRC5為目前最新推出的控制系統(tǒng)�。所屬機(jī)器人大部分用于焊接����、噴涂及搬運(yùn)用。
當(dāng)前使用的機(jī)器人型號(hào)為IRB1410�����,其承重能力為5KG�����,上臂可承受18KG的附加載荷,這在同類(lèi)機(jī)器人中絕無(wú)僅有�。最大工作半徑1444mm,常用于焊接與范圍搬運(yùn)�,具可再擴(kuò)展一個(gè)外部軸的能力。
3�、ABB機(jī)器人系統(tǒng)簡(jiǎn)介
ABB機(jī)器人機(jī)械手為六軸組成的空間六桿開(kāi)鏈機(jī)構(gòu),理論上可達(dá)到運(yùn)動(dòng)范圍內(nèi)任何一點(diǎn)����。每個(gè)轉(zhuǎn)軸均帶一個(gè)齒輪箱,機(jī)械手運(yùn)動(dòng)精度(綜合)達(dá)正負(fù)0.05mm至正負(fù)
0.2mm�����。六軸均帶AC伺服電機(jī)驅(qū)動(dòng)���,每個(gè)電機(jī)后均有編碼器與剎車(chē)���。機(jī)械手帶有串口測(cè)量板(SMB),測(cè)量板上帶有六節(jié)可充電的鎳鉻電池�,起到保存數(shù)據(jù)的作用。機(jī)械手帶有手動(dòng)松閘按鈕,維修時(shí)使用����,非正常使用會(huì)造成設(shè)備或人員被傷害。機(jī)械手帶有平衡氣缸或彈簧���。
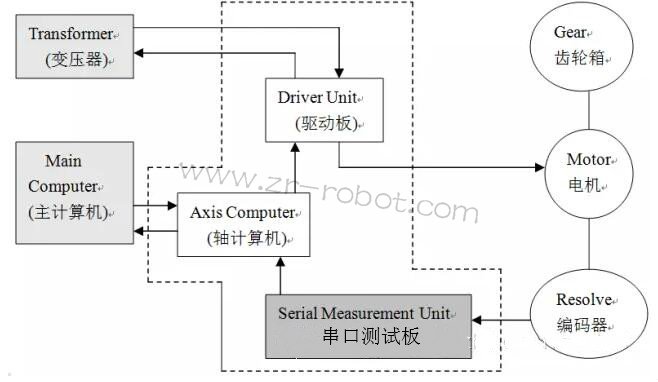
4����、 ABB機(jī)器人伺服驅(qū)動(dòng)系統(tǒng)
5�����、IRC5 系統(tǒng)介紹
主電源���、計(jì)算機(jī)供電單元、計(jì)算機(jī)控制模塊(計(jì)算機(jī)主體)�����、輸入/輸出板�、
connections(用戶(hù)連接端口)、FlexPendant接口(示教盒接線端)��、軸計(jì)算機(jī)板、驅(qū)動(dòng)單元(機(jī)器人本體��、外部軸)���。
A 操縱器(所示為普通型號(hào))
Module��,包含機(jī)器人系統(tǒng)的控制電子裝置����。
Module��,包含機(jī)器人系統(tǒng)的電源電子裝置�。在Single Cabinet Controller 中, Drive Module 包含在單機(jī)柜中���。MultiMove 系統(tǒng)中有多個(gè)Module���。
C RobotWare 光盤(pán)包含的所有機(jī)器人軟件
D 說(shuō)明文檔光盤(pán)。
E 由機(jī)器人控制器運(yùn)行的機(jī)器人系統(tǒng)軟件�����。計(jì)算機(jī)軟件(安裝于上)�。RobotStudioOnline 用于將軟件載入服務(wù)器,以及配置機(jī)器人系統(tǒng)并將整個(gè)機(jī)器人系統(tǒng)載入機(jī)器人控制器。
G 帶選項(xiàng)的系統(tǒng)專(zhuān)用校準(zhǔn)數(shù)據(jù)磁盤(pán)�����。不帶此選項(xiàng)的系統(tǒng)所用的校準(zhǔn)數(shù)據(jù)通常隨串行測(cè)量電路板 (SMB) 提供����。
H 與控制器連接的 FlexPendant,
J 網(wǎng)絡(luò)服務(wù)器(不隨產(chǎn)品提供)��。 可用于手動(dòng)儲(chǔ)存:RobotWare 成套機(jī)器人系統(tǒng) 說(shuō)明文檔在此情況下�����,服務(wù)器可視為某臺(tái)計(jì)算機(jī)使用的存儲(chǔ)單元��,甚至計(jì)算機(jī)本身����!如果服務(wù)器與控制器之間無(wú)法傳輸數(shù)據(jù),則可能是服務(wù)器已經(jīng)斷開(kāi)�!
PC K 服務(wù)器的用途:
使用計(jì)算機(jī)和 RobotStudio Online 可手動(dòng)存取所有的
RobotWare 軟件�。
手動(dòng)儲(chǔ)存通過(guò)便攜式計(jì)算機(jī)創(chuàng)建的全部配置系統(tǒng)文件。
手動(dòng)存儲(chǔ)由便攜式計(jì)算機(jī)和
Online安裝的所有機(jī)器人說(shuō)明文檔�����。
在此情況下,服務(wù)器可視為由便攜式計(jì)算機(jī)使用的存儲(chǔ)單元��。
M RobotWare 許可密鑰���。 原始密鑰字符串印于 Drive Module 內(nèi)附紙片上(對(duì)于Dual Controller�,其中一個(gè)密鑰用于 Control Module�,另一個(gè)用于 Drive Module;而在系統(tǒng)中����,每個(gè)模塊都有一個(gè)密鑰)。RobotWare 許可密鑰在出廠時(shí)安裝�����,從而無(wú)需額外的操作來(lái)運(yùn)行系統(tǒng)����。
N 處理分解器數(shù)據(jù)和存儲(chǔ)校準(zhǔn)數(shù)據(jù)的串行測(cè)量電路板(SMB)。
對(duì)于不帶Absolute Accuracy 選項(xiàng)的系統(tǒng)��,出廠時(shí)校準(zhǔn)數(shù)據(jù)存儲(chǔ)在 SMB 上�����。
計(jì)算機(jī)(不隨產(chǎn)品提供)可能就是上圖所示的服務(wù)器J!如果服務(wù)器與控制器之間無(wú)法傳輸數(shù)據(jù)��,則可能是計(jì)算機(jī)已經(jīng)斷開(kāi)連接�!
文章來(lái)源,
工業(yè)機(jī)器人維修官網(wǎng):etongyue.com

 機(jī)器人資訊
機(jī)器人資訊 80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能?chē)?yán)重過(guò)剩
80%企業(yè)面臨倒閉,工業(yè)機(jī)器人產(chǎn)能?chē)?yán)重過(guò)剩
 首頁(yè) > 維修案例 >
首頁(yè) > 維修案例 >