�����Ŏ�����Q�C���˹���
 �C�����YӍ
�C�����YӍ 80%��I(y��)���R���]�����I(y��)�C���ˮa�܇����^ʣABB��������늾W���g��������Դ�D������C���˕������� �����˙C����ʢ�e���I(y��)�C����ҕ�X��λ���g����2021���ǻۙC���˿ɱO(ji��n)�����I(y��)�C���˹���Ч�������ٷ�֮��ʮ�C���ˮa�I(y��)�l(f��)չ������_ �a�I(y��)���l(f��)ʽ���L���Pע���ܙC�����Ƿ���o��������{������δ�� �C���ˮa�I(y��)�@Щ�I����пɞ�
80%��I(y��)���R���]�����I(y��)�C���ˮa�܇����^ʣABB��������늾W���g��������Դ�D������C���˕������� �����˙C����ʢ�e���I(y��)�C����ҕ�X��λ���g����2021���ǻۙC���˿ɱO(ji��n)�����I(y��)�C���˹���Ч�������ٷ�֮��ʮ�C���ˮa�I(y��)�l(f��)չ������_ �a�I(y��)���l(f��)ʽ���L���Pע���ܙC�����Ƿ���o��������{������δ�� �C���ˮa�I(y��)�@Щ�I����пɞ�
 ��� > ABBʾ�����S�� >
��� > ABBʾ�����S�� > 
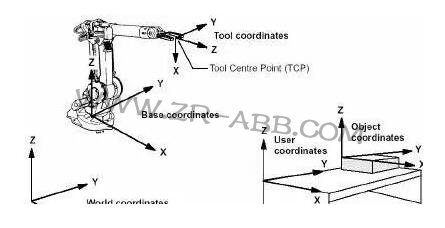
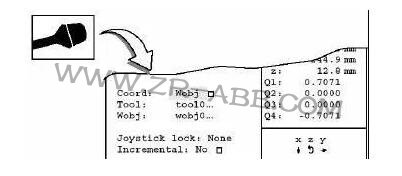
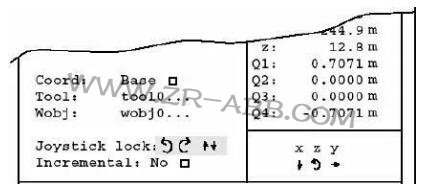
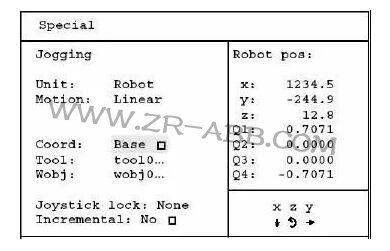
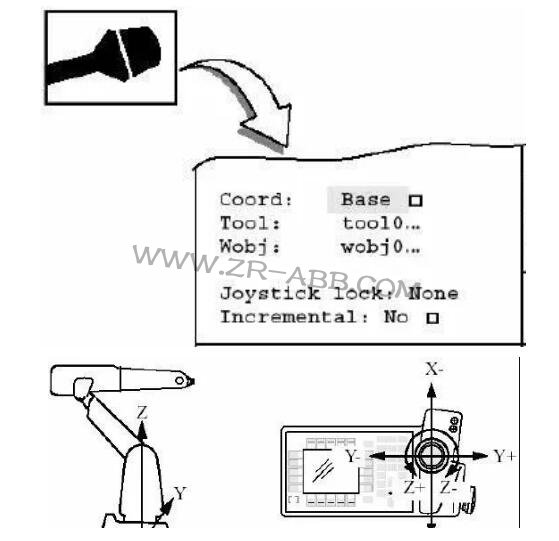
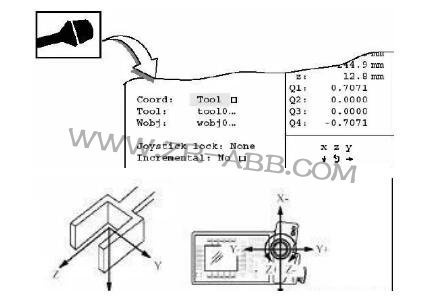
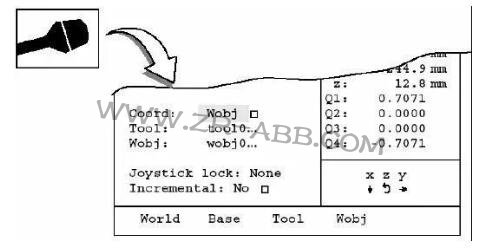
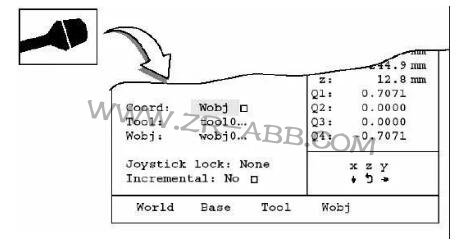
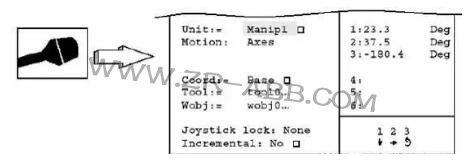
| Worldcoordinates | �������ϵ | |
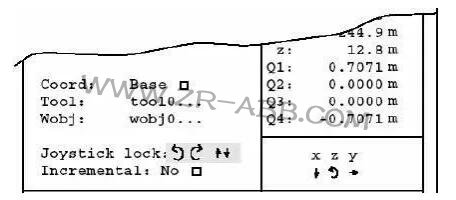
| Basecoordinates | ���A����ϵ | |
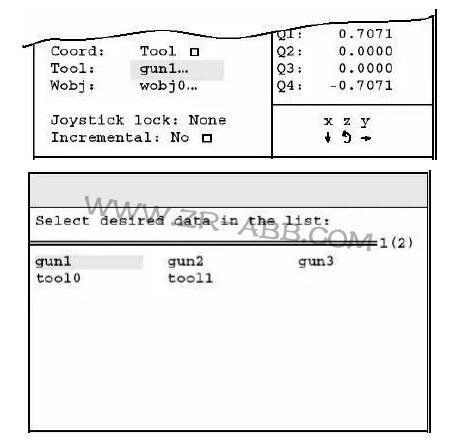
| Toolcoordinates | ��������ϵ | |
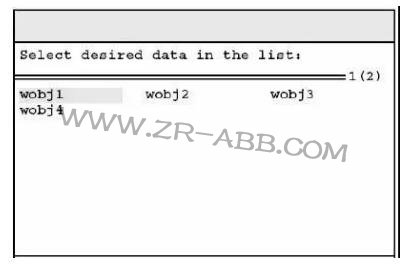
| Workobjectcoordinates | ��������ϵ |